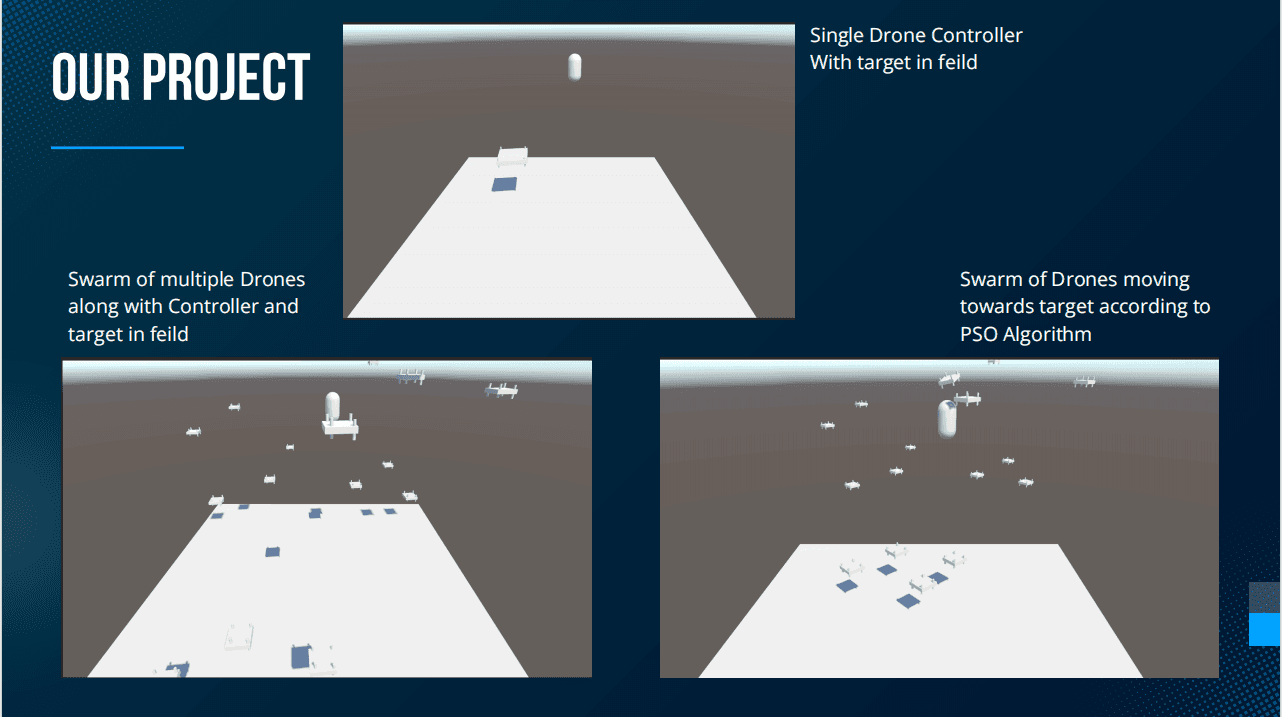
Drone Swarm Coordination System
The project aims to develop a decentralized, intelligent swarm system that can
adapt dynamically to real-time data and shifting mission objectives without the
need for a central control unit. The end goal is to simulate an autonomous swarm
of drones capable of performing complex tasks such as area surveillance, target
tracking, and data collection efficiently. Key objectives include:
1. Swarm Intelligence Algorithms for path planning and dynamic task
allocation.
2. Decentralization to avoid single points of failure and increase resilience. Collision Avoidance to enable safe and optimal movement of drones.
3. Robust Communication Protocols with mesh networking for low- bandwidth, fault-tolerant communication.
4. Adaptive Mission Planning using real-time data integration and AI-driven
planning